
Robôs



Dois fatores importantes foram considerados no desenvolvimento dos Kilobots: o custo e a funcionalidade. O robô precisa de funcionalidade suficiente para permitir a execução de uma ampla variedade de comportamentos coletivos, enquanto, ao mesmo tempo, deve ser simples o suficiente para manter o custo baixo. Para tal, os robôs foram desenvolvidos com as seguintes características:
Comunicação
- Os Kilobots podem se comunicar com seus vizinhos a até 7 cm de distância refletindo a luz infravermelha (IR) pela superfície do solo. Para tal, cada robô possui um transmissor de LED infravermelho e um fotodiodo receptor.
Sensoriamento
- Ao receber uma mensagem, a distância até o Kilobot transmissor pode ser determinada usando a intensidade do sinal recebido.
- A luminosidade do ambiente em que o robô se encontra pode ser detectada.
- O Kilobot pode medir a voltagem da própria bateria.
Movimento
- Cada Kilobot tem 2 motores de vibração, que são independentemente controláveis, permitindo o acionamento diferencial do robô. Cada motor pode ser ajustado para 255 diferentes níveis de potência.
Além disso, cada Kilobot tem um microcontrolador integrado (ATmega 328p) com 32k de memória programável (usada para o programa do usuário e o gerenciador de inicialização) e 1K de EEPROM para armazenar valores de calibração e outros dados não voláteis. Para alimentar o robô é utilizada uma bateria Íon-lítio de 3,4 V. Também há um carregador embutido para a bateria.

Primeira versão do robô feita pelo grupo Kilobots@UFSC
A construção dos robôs pelo grupo Kilobot@UFSC baseou-se no projeto original dos Kilobots desenvolvido pela Universidade de Harvard, e principalmente no projeto adaptado desenvolvido pela WCU (Universidade da Carolina do Oeste). No entanto, ainda foram feitas algumas alterações significativas para viabilizar construção dos robôs, tendo em vista que a soldagem seria feita manualmente, fora do ambiente industrial.
A principal adaptação feita foi a troca de todos os resistores e capacitores com encapsulamento SMD 0603 por seus correspondentes com encapsulamento SMD 0805. No entanto, para tal, foi necessário redesenhar o layout da placa de circuito impresso do robô. A nova placa foi confeccionada com 40mm de diâmetro.
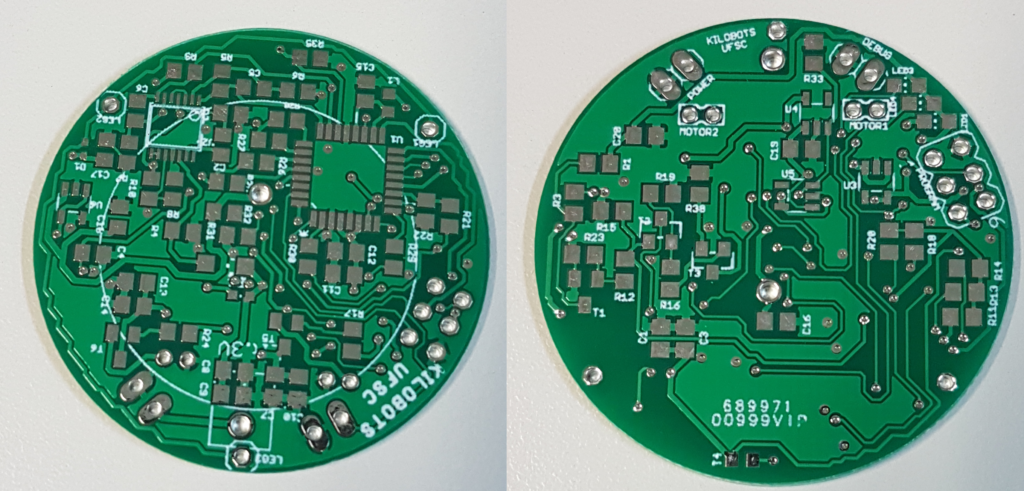
Faces inferior e superior da placa de circuito impresso do robô.
Em relação ao projeto original, procurou-se manter a localização dos principais componentes, como os emissores e receptores, o microcontrolador e os circuitos integrados. Além disso, a posição das pernas do robô e dos pinos para programação, debug e power também foram mantidos para que não atrapalhassem o posicionamento do suporte da bateria e o movimento do robô. O LED RBG foi substituído por três LEDs simples de cores correspondentes (verde, azul e vermelho). O circuito de carregamento da bateria também foi modificado.
Em breve serão disponibilizados os arquivos da nova versão dos Kilobots desenvolvidos pelo grupo. Tendo em vista que as adaptações feitas não alteram significativamente o funcionamento dos robôs, é possível utilizar como referência a documentação disponibilizada pela WCU em Kilobots@WCU, onde encontram-se os guias de usuário, montagem e soldagem, além de todos os procedimentos para gravar e utilizar os Kilobots.