
OHC



O OverHead Controller (OHC) ou “controlador suspenso” é o dispositivo utilizado para enviar comandos em área aos kilobots via radiação infravermelha. Estes comandos podem ser imediatos, como run/pause, ou podem ser envios de novos programas.
-
Comunicação
Para que a comunicação seja bem-sucedida, uma superfície plana reflexiva é essencial, tendo em vista que o fotodiodo receptor infravermelho é acoplado na parte inferior do Kilobot. Este sensor é o mesmo utilizado na comunicação entre kilobots. Para um uma área circular de um metro de diâmetro, o OHC deve estar a um metro de distância vertical.
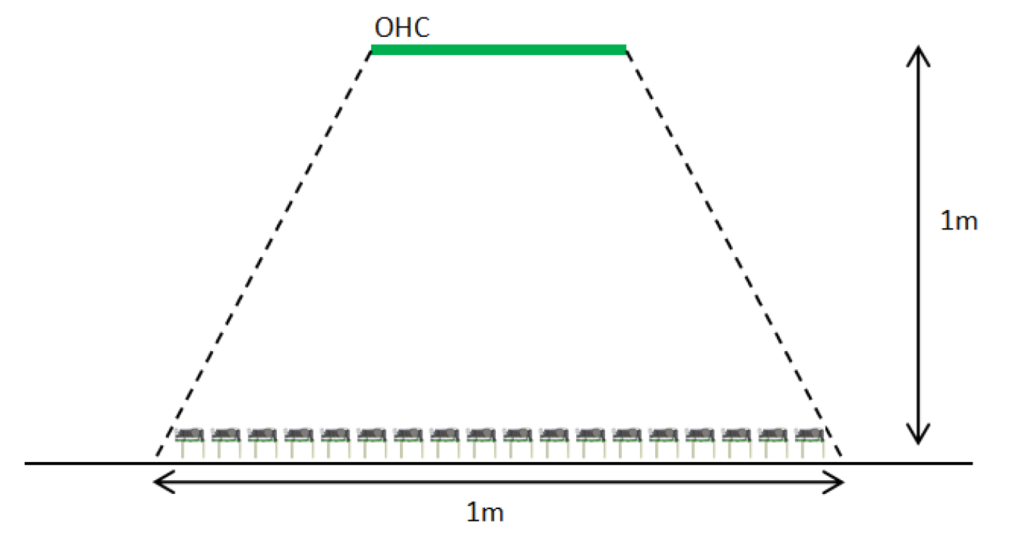
Distância ideal de comunicação OHC/Kilobots
Através da interface gráfica KiloGUI, o usuário tem acesso a todas as funções do OHC em tela única (mais detalhes na seção Programação e Simulação).
-
Projeto OHC Kilobot@UFSC
A intenção do novo projeto do OHC foi inserir componentes do mercado nacional, com o objetivo de facilitar a aquisição destes sem grandes aumentos no valor total de confecção do equipamento.
No projeto original, o OHC, além da comunicação via infravermelho, é responsável pela programação individual dos microcontroladores dos kilobots via cabo. No projeto Kilobot@UFSC optou-se por utilizar o gravador externo USBASP como forma de simplificação.
Um novo design da placa foi montado contando com as adaptações do grupo.
A lista de componentes e projeto do OHC para reprodução serão disponibilizados em breve.